 打印本文
打印本文  关闭窗口
关闭窗口 当前单相APFC技术已完全成熟,应用到开关电源中可提高功率因数至o.98以上,成为许多开关电源的必备前级,应用日益广泛。快速高效地设计出满足系统要求的APFC已成为工程技术人员必须面对的问题。MATLAB强大的信号分析处理能力对高效地设计APFC及整定各个环节的参数带来了极大便利。本文采用MATLAB设计实现了一个3KW的功率因数校正器,给出了SI MULINK仿真电路及波形,并成功应用于研发的Xray电源系统中。
2.APFC控制原理简述
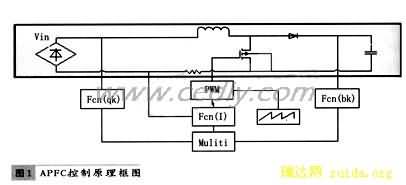
传统的功率因数校正器,主电路一般采用B00ST升压电路,控制策略采用平均电流法控制。其基本控制思想为:检测电路平电流,使之跟随网压,与网压同波形、同相位从而实现输入端功率因数近似为1。如图1,Fcn(qk)为网压衰减环节,取得网压信号作为电流的标准参考量的一部分;Fcn(bk)为反馈电压校正环节,以保持输出电压的稳定;Fcn(I)为电流校正环节,实现对电流的正弦化校正。
 |
3.APFC的HATLAB设计
这里,以设计一个3 Kw的有源功率因数校正器为例进行叙述。假设输入电压为2 2 0 Vac,输出电压为4 O O V d c.输出电容为9 4 o u F,储能电感为1 m H.基于此,对A P F c控制部分进行 M A T L A B仿真设计。 对A P F c控制电路的设计即是合理地整定Fc n(qk)、 Fcn(bk)及Fc n(i)三个环节的参数,以使电路获得良好的稳态和动态响应性能。
网压和输出电压分别经前馈环节F c n(q k)和反馈环节Fcn(bk)进入乘法器相乘后作为电流环的基准量。这样为了确保回路电流的正弦波形,乘法器的输出必须为标准的正弦波形,所以F cn(qk)、F c n(bk)要尽可能的衰减可能引起电流波形失真的各种谐波及相移因数。乘法器输出幅值决定着平均电流的大小,为了实现宽范围输入电压下稳恒的输出电压,必颂使乘法器的输出幅值与网压成反比。
●前馈电压环节(Fcn(q k))的设训。
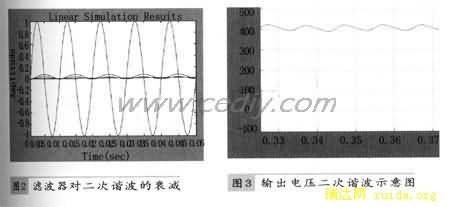
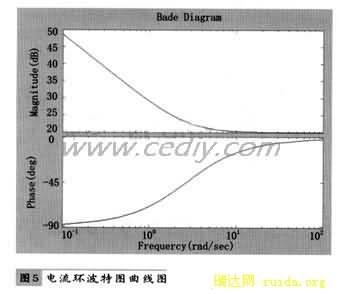
APFC电路在宽范围输入电压下,输出电压是稳定的,由APFC控制理论知,网压经Fcn(qk)后的量必须与网压成反比。同时,需要最大程度的衰减二次谐波对输入电流失真的影响。对此,可以设计一个截至频率很低的单极点滤波器来获得平均输入电压,但是系统对输入电压的响应速度也有较高的要求。这里选择二阶滤波器作为平衡折衷的一个选择。并且,二阶滤波器还将导致二次谐波相移1 8 0度,从而使产生的三次谐波电流与输入电流的相移量变得与电压相同。基于此,对该滤波环节作了试凑设计。对前馈环节的滤波环节没计,主要是确定两个极点的位置。运用MATLAB 自控设计工具箱,可方便地调整极点化置以获得良好光的衰减性能和快速响应。见图二,二次喈波儿乎无法通过,并且系统也有良好的响应性能。经多次试凑实验,最后设定两个开环极点为:
 |
p1=23.4 p2=-1 O.1
假设整流后的电压为
由傅立叶分解知
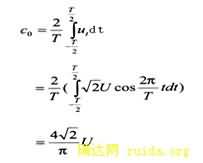 |
这里、CO及为网压的平均值
由以上叙述最后,得到的前馈环节,如图4。
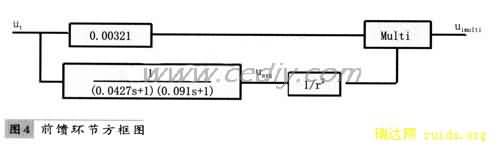 |
这样前馈缓解进入到乘法器的量如下:
 |
由3―4式知,前馈环节进入到乘法器是一个与网压成反比的正弦量
●电压反馈环节(Fcn(bk))的设计
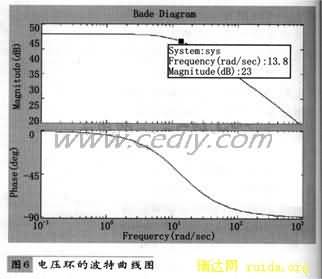
功率输出级的基本低频模型是一个驱动电容器的电流源,形成一个积分器,它的增益特性是随频率每增加10倍而滚降20dB。由于电压环的带宽与开关频率相比比较窄,所以电压环设计主要考虑保证输入畸变为最小,而不是稳定性。首先,电压环的带宽必须足够窄,以衰减输出电容上的二次谐波,保证输入电流的调制比较小。其次,电压环必须有,足够的相移,使调制出来的信号能与输入电压保持同相,获得较高的功率因数。输出电压的二次谐波可由2―5得出。
Vopk为输出纹波电压的峰值,fr为纹波频率Co为输出电容,Vo为输出直流电压。
假设APFC要求3%的THD, 由APFC设计原理知,O.7 5%的THD分配给电压环,所以电压环输出纹波电压应限制在1.5%。基于此,确定二次谐波频率处电压环的增益,其设计原理类同于前馈电压环的设计,最终得电压环反馈环节如下:
●电流环(Fcn(I))补偿
对前馈电压跟反馈电压双环进行补偿后,经乘法器产生了一个理想的参考电流波形。对电流环进行补偿,提供一个接近开关频率的平直增益。其中放大器的中低段的零点提供高增益,是平均电流型控制能够工作。接近开关频率的放大器增益由匹配电感电流的下降率来决定。其中,功率电路电流反馈信号的变化:
![]() RS为主电路检测电阻。 (3-7)
RS为主电路检测电阻。 (3-7)
在开关频率处(这里,假设开关频率为40K)放大器的增益:
![]() 其中VS为电流环输出 (3-8)
其中VS为电流环输出 (3-8)
采用PID调解器对电流环进行补偿如下:
由上所述,MATLAB的自控工具箱的可视化界面,可以方便的调整零、极点位置、并能直观地观察出各环节的稳态及暂态响应性能,便于实时调节设计,MATLAB为快速高效地设计满足需要的APFC提供了极大的便利。
4.APFC的S IMUL INK仿真电路及波形
最后,根据前面对三个环节的设计补偿,得到以下SIMULINK仿真电路。图7。
  |
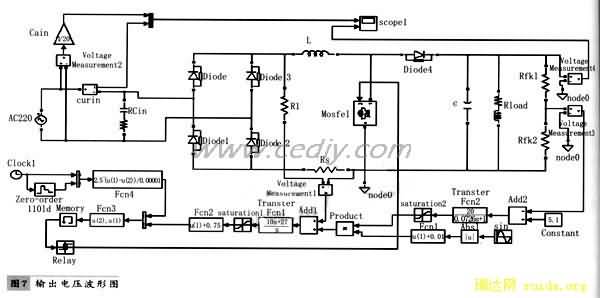 |
其中三角波放生电路由时钟、采样保持器、复合器及Fcn4构成,以产生一个频率为40K,幅值为2.5的三角波形;反馈电压环节由常数Constant、加法器A d d 2、传递函数T r a n s f e r F c n 2构成;电流环节由传递函数构成,形成一个P I调解器;两个饱和器s a t u r a t i o n l、saturation2的加入,限制了电压环,电流环的最大输出。输入交流电压波形检测部分由正弦波发生器Si n e Wa v e 1,求绝对值器A b s 1,即通用表达式F c n 1组成,模拟取得的电网电压。
 |
 |
构建完仿真电路后,选择合适的算法进行仿真。其中,解算选项为:变步长,最大补偿1 e-6,,相对精度1e-3,算法选择ode23。
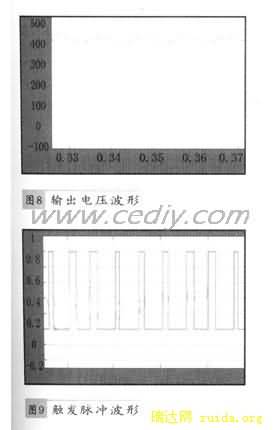
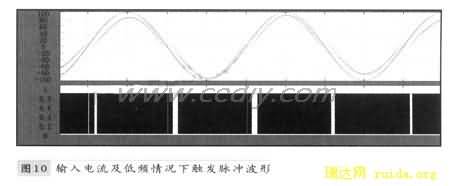
以下为仿真电路实测波形.
5.结论
APFC的控制电路为双环耦合控制电路,参数需要反复调试,才能最后获得好的效果。本文利用MATLAB的自控工具箱与信号处理工具箱快速高效地的整定符合电路要求的APFC电路参数,极大地减少了实际电路调试的难度,并成功应用于研发的Xray电源系统中。
打印本文 关闭窗口