 ��ӡ����
��ӡ����  �رմ���
�رմ��� �ؼ���������ʽ��ѹ�������� ��̬����ģ�ͣ� ˥������
1 ����
�ڳ���ѹ�����·�ϣ����ھ��á������ȷ����ԭ��ͨ�����õ���ʽ��ѹ��������CVT����Ϊ��ѹ�任Ԫ��������ϵ͵�ѹ�������Ͳ���Ԫ��ʹ�á����ֵ�ѹ��������̬���Բ��һ�β���������·ʱ������Ķ��ε�ѹ�к��д������������п���ʹ�̵籣��װ����������ˣ��б�Ҫ��CVT����̬���������о����ҳ����еĹ��ɣ����������������Ӱ�죬�о��µı����㷨�Ƿdz�������ġ�CVT��̬���̵��о��������˺ܶ�Ĺ���������Ҫ������CVT�������ر仯����̬���̴�С��Ӱ�졣������ӽ���CVT��̬����ģ�����֣������о�����̬��������ɡ��仯�����Լ�Ƶ���ص㣬�õ���һЩ�м�ֵ�Ľ����
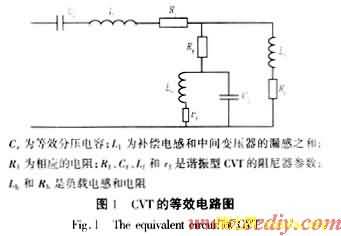
2 CVT�ĵ�Ч��·
CVT�ɷ�ѹ���ݡ������翹�����м��ѹ�����������Ȳ�����ɡ��������о�ϵͳ��·����ʱCVT����̬���̡�ϵͳ��·����ʱ����ѹ���ͣ��м��ѹ�������IJ��ᱥ�ͣ������Ż�·��CVT��̬���̵�Ӱ����Ժ��ԡ����CVT�ĵ�Ч��·������ͼ1����ʾ��Ϊ����߲������ȣ��ڹ�Ƶ��Cf��Lf���ڲ���г��״̬��Ce��L1Ҳ���ƴ��ڴ���г��״̬��
3 CVT����̬����
��CVTһ�κͶ��ε�ѹ�ֱ�Ϊu��u2����Ӧ��������˹�任ΪU��s����U2��s������ͼ1֪CVT��Ч��·��һ������ϵͳ����˿ɱ�ʾΪ
![]()
ʽ��1���У�G��s��ΪCVT�Ĵ��ݺ�����
���ݵ���ԭ�������Ϻ�CVT��һ�ε�ѹ�ɱ�ʾΪ
![]()
ʽ��2����u��0����ϵͳ�������е�ѹ����u�ǹ��Ϸ�����ѹ��
��ʽ��2������������˹�任����

ʽ��4����L��1����Ϊ������˹���任�ķ��š�
���ǵ�u��0������̬������һ�ε�ѹ�Ͷ��ε�ѹ��һ������ϵͳ���ѹΪ��ֵ����������CVT����̬����������֪
![]()
�ۺ�ʽ��5����ʽ��4����ʽ��2���Ľ������
��Ȼ���ž���CVT����̬������Ϊ�˽�һ�������ţ���t��0ʱ�̷������ϣ�����ǰ���CVTһ�ε�ѹ�ֱ�Ϊ

���ڵ�ѹ�Dz��ù�һ����ʾ�ģ����ʽ��8���м����˹���ǰ��ѹu��0���Ĵ�С����ϵͳ�Ķ��ѹ����U���ǹ��Ϻ������IJ�ѹ��ϵͳ���ѹ�ı�ֵ����ȻU��1�������ǹ��Ͻǣ���d�ǹ���ǰ���ѹ��λ�ı仯�����ϵͳ�迹����·�迹���迹����ȣ������Թ���ʱ��d��0�㣬��·���ھ�С�������ʱ��d���ɴ�90�㡣��ʽ��8����ʽ��9������ʽ��2�����ɵù��Ϸ�����ѹΪ

��ʽ��ȻҲ���Դ�ʽ��8����ʽ��9������������ޱ�Ҫ��ֻ��ע��һ�㣺�����ڽ����Թ���ʱ�͵��ڹ��Ͻǣ������ɵ������ʱ������ϽDz���ȡ�
��ʽ��10������������˹�任�����ʽ��7������
��ʽ��11��֪��CVT����̬���������ѹ�Ĺ��Ϸ�����U�ɼ����ȹ�ϵ�����ڹ��Ϻ�ı仯������ȡ���ڦ������ڹ�����̬���̽�������̬���ţ�0��������ij������Ĺ��Ϧ�U�Ǹ���������˦���һ����˥����0���������ij�֮Ϊ˥�����ӡ�
��������CVT�����йأ�Ҳ����ϵij�ʼ�Ƕ������йء�
4 ��̬�����ı仯����
������һ����͵�CVT������1���������������㵽һ�βࡣ
CVT�Ķ����Ϊ��Rb��1352 k����Lb��3229 H��
������Щ������ͼ1��·������MATLAB������㹤�ߣ����CVT�Ĵ��ݺ���Ϊ



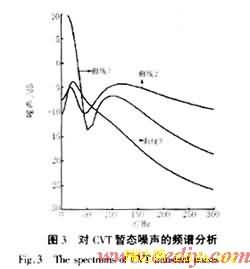
��ʽ��14���ͣ�15���п��Կ��������ɵ�Ƶ��������Ƶ�����ͷ����ڷ�����ɣ����ǵ�˥��ʱ�䳣���ֱ�Ϊ��1����2�ͦ�3����С��Ҫ��CVT�IJ�������������ʱ�䳣����1����2����3����˵�Ƶ�����ڦ������������á�������������˥���ܿ죬ֻ�ڹ��Ͽ�ʼ���������������á������IJ�ͬ������Ӱ����и������ķ�ֵ�ͳ���ǣ�������Ӱ���������Ƶ�ʺ�˥��ʱ�䳣�������ڵ�Ƶ����ռ������λ��CVT����̬������Ҫȡ���ڵ�Ƶ�����ķ�ֵA�ͳ������1������ʽ��14���ͣ�15���������������0��ʱ��A��0��5927��![]() ��90��ʱ��ֵ��0��ʱ�½��˽���һ�롣����������90��ʱ���Һ���ֵ���½��ģ����ǵ���ֵ��˥�������ӽ���������ˮƽ��ͼ2�����������¦��IJ��Σ�ͼ�е������ǵ�Ƶ�����IJ��Ρ���ͼ2�п��Կ�����������0�����ʱ��CVT����̬����Ҫ��90��ʱ���صö࣬�������5ms��Ƶ�����IJ�������Ѿ��ܽӽ��ˡ�
��90��ʱ��ֵ��0��ʱ�½��˽���һ�롣����������90��ʱ���Һ���ֵ���½��ģ����ǵ���ֵ��˥�������ӽ���������ˮƽ��ͼ2�����������¦��IJ��Σ�ͼ�е������ǵ�Ƶ�����IJ��Ρ���ͼ2�п��Կ�����������0�����ʱ��CVT����̬����Ҫ��90��ʱ���صö࣬�������5ms��Ƶ�����IJ�������Ѿ��ܽӽ��ˡ�
ͼ3�Ǧ���Ƶ�ס�����1��������0��ʱ���������Ҫ�ɵ�Ƶ������ɡ�����2��������90��ʱ�������Ƶ��Χ�ȽϹ㣬����ͼ2�п��Կ�������ʱ�����Է�Ϊ����ʱ��Σ����ϸտ�ʼ����Ҫ�Ǹ�Ƶ����������5ms���Ƶ�����Ѿ�˥���˺ܶ࣬ͬʱ��Ƶ��������������ռ����������λ������ʱ��Ƶ����Ҳ����һ����˥�������������̬����ˮƽ�Ƚϵͣ�ͼ3������3�����ڦ�����ǰ5ms���κ��Ƶ�ף���Ƶ�����Ѿ���С�ˡ����Ҫ������̬�������ص���������Ƶ������Ӱ�졣

5 ���غ�CVT��������̬������Ӱ��
���ڲ�ͬ��ʵ��ϵͳ��CVT�ĸ����Dz�һ���ġ���ͬ�ͺŵ�CVT��Ʒ�������Ҳ���в��졣��1�г���CVT�������ظı�ʱ��̬�������������ı仯���������Cf��Lf��Ce��L1�ڹ�Ƶ��Ҫ����г���ϵ�������Cf��Ce�ı�ʱLf��L1Ҳ��Ӧ�����˸ı䡣��1�и������ķ�ֵ��������0��ʱ�ļ�������

�ӱ�1�п��Կ�������CVT�IJ������ر仯ʱ����
1�������ڷ����ķ�ֵ��K5���Ƚ�С���������ڶ��ѹ��10�����£��ٿ��ǵ���˥��ʱ�䳣������3����С��������CVT�����Ӱ���С��
2�����ر仯ʱ��Ƶ������f1����Ƶ������f2����Ƶ�ʱ仯��С��f1��������17 Hz���ұ仯��f2��������90 Hz���ұ仯����Ƶ������˥��ʱ�䳣������1���Ƚϴ���11 ms���ұ仯����Ƶ������˥��ʱ�䳣������2���Ƚ�С����2��3ms֮�䡣�����CVT�IJ������ر仯ʱ����Ƶ������Ƶ��������̬ �����еĵ�λû�иı䡣
3�����ص������仯����̬������Ӱ��С�������������ı仯�Ե�Ƶ�����ͷ����ڷ�����˥��ʱ�䳣��Ӱ��Ƚϴ��ر��Ƿ����ڷ����dz����У��Ӷʱ��2 ms�仯����������Ϊ0��1ʱ��14 ms��������������ʱʱ�䳣������ʹCVT����̬����˥����������CVT���ز����ϵͳ����Ϊ������һЩ�����Ը��������ڼ��ٲ�����
4����CVT�ķ�ѹ���ݺ���������仯ʱ����Ȼ˥��ʱ�䳣����Ƶ�ʸ��ʱ�Ƚϱ仯�ϴ���̬�����������Ĺ��ɺ͵�Ƶ����ռ������λ���ص�û�иı䡣
6 ����
CVT����̬�������ѹ���Ϸ����Ĵ�С�����ȣ�������һ����Ƶ��������Ƶ�����ͷ����ڷ�����ģ������ʾ�����е�Ƶ����ռ������λ����Ƶ����˥���ܿ죬һ��ֻ�ڹ��Ϻ�5ms�ڷ������á����صı仯��CVT��̬������������Ƶ��Ӱ���С�������ع��������Է����ڷ�����˥��ʱ�䳣��Ӱ��ܴ���������ʱ��̬���̸������ء����ϽDz���Ӱ����̬������Ƶ�ʺ�˥��ʱ�䳣��������Ӱ��������ķ�ֵ�ͳ���ǣ��ڵ�ѹ���㸽������ʱ��̬�������ء�
���ĵĽ��Ϊ��߿��ٱ����ĵ�ѹ���������ṩ���µ��о�˼·��������CVT���ز����ϵͳ����Ϊ������һЩ�����Ը��������ڼ��ٲ���������CVT��̬������Ҫ�ǵ�Ƶг�����ص㣬�ڱ����㷨������һ�������˲�����������Ч�ؼ���CVT����̬�����������źŴ����������ڲ�����ѹ������ʵʱ��ʶ��CVT��̬�����������IJ���������������Ӱ�졣ͨ�������ṩ��CVT������ʵ��ĸ��ز������������������̬�����и�������Ƶ�ʺ�˥��ʱ�䳣���������ʵʱ������ʶʱ����Ҫ��ʶ��ֻ�Ǹ������ķ�ֵ�ͳ���ǣ�������������������ʵ��ĸ��ز��������ǵ���������Ƶ���ڸ��ظı�ʱ�仯��С�����Ƶ�ʻ��ǿ��������������ͨ����ѹ����ʵʱ��ʶ���������ķ�ֵ��������Լ�˥��ʱ�䳣����
��
��
��ӡ���� �رմ���