1 引言
在计算机网络及其相关网络通信技术迅猛发展的推动下,为确保在进行信息资源共享时所获得的数据、文件和图形等资料具有高度的真实可靠性、连续性和高保真度UPS(不间断电源)正越来越广泛地被应用到国民经济的各个领域。同时,随着信息技术的发展,智能信息处理以及基于网络的远程监控等新技术逐步应用于UPS中,构成了全智能化的UPS系统,方便了用户、提高了可靠性。本文着重介绍UPS控制技术,分析了UPS的PID控制技术的特性并深入分析了基于PID控制和重复控制的复合控制策略。
2 控制策略概述
UPS逆变器的数字控制技术成为了当前逆变器研究领域的一个热点,出现了多种逆变器数字化控制方法,包括数字PID控制、状态反馈控制、无差拍控制、重复控制、模糊控制等,有力地推动了UPS技术的发展。
每一种控制方案都各有其长短。某些控制方法虽然具有较好的动态响应速度,但稳态输出电压谐波失真度又达不到要求;某些控制方法虽然同时具有较高的动态和稳态精度,但它对参数变化很敏感,鲁棒性不好;某些控制方法有很好的稳态精度,但动态响应效果却很差;某些控制方法受硬件水平的限制,目前还不能得到很好的应用。因此,一种必然的发展趋势是各种控制方案互相渗透,相互取长补短,构成复合的控制方案。
3 数字PID控制
在UPS逆变器控制中,最常用、最简单的方法是PID控制,具体实现方式包括电压瞬时值反馈控制和电压电流双闭环反馈控制,图1所示为电压瞬时值反馈控制。
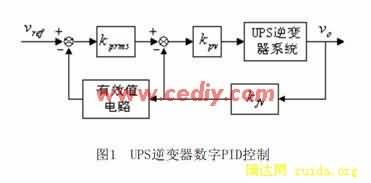
图1 UPS逆变器数字PID控制
电压瞬时值反馈的控制策略优点是只使用了一个电压传感器,缺点是系统动态响应特性不好,跟踪特性不是很好, 波形质量欠佳。图2为采用此控制方法在10KVA逆变器上带容性负载时的输出电压波形。从图中可以看出波形失真度较大,难以满足高质量电源的要求。
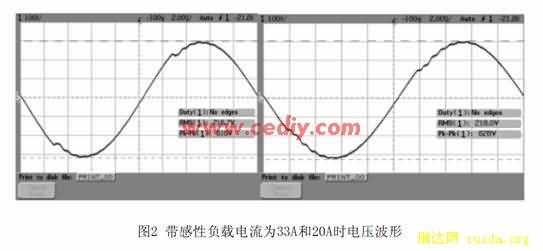
图2 带感性负载电流为33A和20A时电压波形
改善电压源逆变器的动态特性的方法之一是增加一个电流闭环。在这种控制策略中,滤波电容的电流(也就是输出电压的微分)作为一个反馈变量引入到控制系统中,达到改善输出波形质量,它必须使用一个霍尔传感器来检测滤波电容电流,增加了系统的复杂性和成本。
4 基于PID控制和重复控制的复合控制
逆变器控制器是一个参考给定呈正弦变化的调节系统,而不是一个恒值给定的调节系统。同时,系统的扰动即负载电流,也不是一个恒值扰动,当接线性负载时,负载电流呈正弦变化;而当带非线性负载时,电流按非正弦规律变化。针对正弦指令的无静差跟踪问题,可以在控制器中植入一个与参考给定同频的正弦信号模型。
![]()
(1-1)
其中ω为正弦指令的角频率。可以验证,当指令和扰动都以角频率ω做正弦变化时,一个稳定的包含(1-1)所示内模的调节系统是无静差的。然而这只是在假定为线性负载的条件下得到的结论。实际负载要比这复杂的多,而且大多为整流性负载。这样的负载电流是非正弦的,其中包含了基波以及基波频率整数倍的多重谐波。因此实际的扰动频率成分是很丰富的,如果对所有的这些频率的扰动均实现无静差,植入正弦信号内模的方法就不适合了。
扰动信号都有一个共同特征,即在每一个基波周期都以相同的波形重复出现。因此,基于内模原理的重复控制可采用如下的一种“重复信号发生器”内模。其传递函数为:
![]()
(1-2)
其中L为逆变器输出基波周期。将其离散化,得到延迟一个周期的正反馈环节。这一延迟环节正是重复控制的致命缺点,它对跟踪误差的调节作用滞后一个工频周期。因此考虑将PID控制方式与重复控制方式结合在一起,形成了基于PID和重复控制的新型UPS逆变器波形控制方法,利用重复控制改善系统的稳态输出波形质量,利用数字PID控制提高系统的动态特性,使系统兼具良好的稳态和动态特性。
前馈控制的目的是改善数字PID控制器的控制效果,进一步减小动态过程中输出电压的波动和波形畸变,改善数字PID控制系统的稳定性。离散重复控制器,用来消除系统的周期性跟踪误差,减小UPS逆变器带非线性整流负载时的输出电压波形畸变。数字PID控制器,作用是对输出电压跟踪误差进行实时调整,减小系统受到干扰时的输出电压波动和畸变。控制框图如图3所示。图中主要环节介绍如下:
1)z-N :周期延迟环节,使本周期误差信息从下一周期开始影响矫正量。
2)Q(z) :为克服对象模型不精确,增强系统稳定性而设置的。可取一个小于1的常数。
3)S(z) :补偿环节,用于改造对象特性。
4)zk :相位补偿,满足系统频率响应要求。
5)a :比例因子。用来维持系统的稳定性。
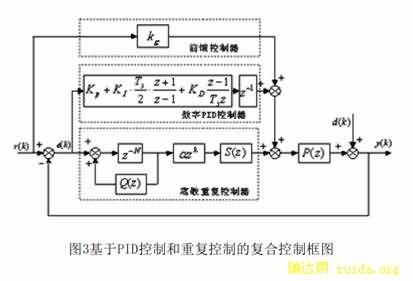
图3基于PID控制和重复控制的复合控制框图
5 实验结果
依照上述模型,用simulink仿真可初步确定控制器的参数,开始用较保守的参数在10KVA的逆变模块上试验.,调整参数使系统达到较好的静动态特性。系统参数为:输入直流电压为200V、输出频率50HZ、开关频率19.6HZ、滤波电感120uH、滤波电容15uF图4左为带阻性负载,电流为36A时的电压电流波形;右为带整流性负载,电流为20A时的电压电流波形.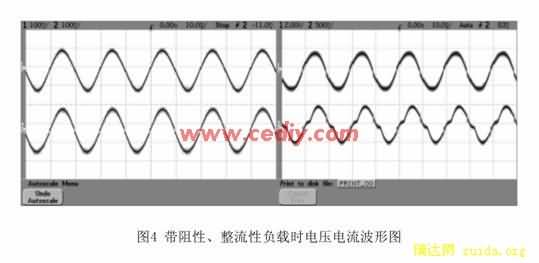
从以上两图可以看出,基于PID控制和重复控制的复合控制策略具有较好的波形控制效果,特别是对非线性整流负载具有很好的谐波抑制效果,同时系统还具有较好的动态响应特性。因此,本文介绍的基于PID控制和重复控制的复合控制策略具有较高的应用价值。
参考文献
[1] 候振义, 王义明, “UPS电路分析与维修”, 科学出版社, 2001
[2] 李成章, “现代UPS电源及电路图集”, 电子工业出版社, 2001
[3] S. Karve, “Three of a kind [UPS topologies, IEC standard],” IEE Review, vol.46, no.2, pp.27-31, March 2000
[4] 马旭东,基于DSP的UPS智能控制技术,电气自动化,2003年第一期,26-27
[5] H. Pinheiro, P. Jain, “Comparison of UPS topologies based on high frequency transformers for powering the emerging hybrid fiber-coaxial networks,” IEEE- INTELEC '99, pp.9-12, 1999
[6] 林新春,段善旭,基于DSP的UPS全数字化控制系统,电力电子技术,2001年第二期,51-53

















