摘 要:本文对三相变流器控制系统结构进行了讨论。针对普通变结构控制的抖振问题,采用增加积分环节的办法降低抖振现象。介绍了变结构控制器的设计过程,最后给出了试验结果。
关键词:三相变流器,单位功率因数,滑模变结构控制
VARIABLE-STRUCTURE CONTROL WITH SLIDING MODE OF THREE PHASE CONVERTER
Abstract: The structure of a three phase converter control system is discussed in this paper. To solve the chattering problem in the traditional variable structure control, an integral section is added to reduce chattering. The design process of the variable-structure controller is introduced and supported by the experiment results.
Key words: Three Phase Converter Unit Power Factor Variable-Structure Control with Sliding Mode
1 引 言
滑模变结构控制(Variable-Structure Control With Sliding Mode)作为一种特殊的非线性控制策略,已经越来越多地被应用于各种控制系统当中。这主要是因为它无需系统的准确数学模型就能实现很好的控制鲁棒性,特别适合于非线性对象和变参数对象控制。同时还因为它在控制上具有了某种程度上的智能色彩,一般也把它归入智能控制。
三相PFC变流器既是一个典型的非线性对象,又是一个变参数对象。同时它也是一个多变量系统,在控制上对控制变量具有一定要求和难度。因此可以考虑应用滑模变结构控制。本文针对三相PFC变流器的控制问题分析、讨论了系统结构并介绍有关变结构控制器的设计,最后给出试验结果。
2 三相PFC变流器的系统结构
作为AC/DC变流器,三相PFC变流器主电路如图1所示。系统控制目标有两个:1)让输出直流电压Uo等于设定的期望值;2)让三相输入电流的相位保持与输入电源电压的相位保持一致(单位功率因数状态)或者保持期望的相位(无功补偿状态)。

图1 三相PFC变流器主电路如图
为了保证对输入电流具有较高的控制品质,变流器控制系统确定为带有电流闭环的双环系统结构是合理的。内环是电流环,用以实现对电流的精确控制;外环是电压环,保证输出电压恒定。为了突出外环设计问题,这里对电流内环仅做简要说明。由于被控制的电流是按正弦变化的电流量,为了实现精确的控制,这里采用电流分解控制。即,将电流分解成为有功分量和无功分量分别实施控制。根据对d-q变换建立的小信号模型的分析,可以得出电流内环的系统结构如图2所示[1]。

图2 系统电流控制环
图中 D(s) — 电流调节器
Gb(s) — 三相桥传函
GL(s) — 输入电感传函
ud — 电流环扰动
变流器的三相桥部分近似等效成一个时间常数等于三角载波周期的一半,并且具有高增益的一阶惯性环节[2-3]。另外,由于电流内环的局部校正作用和变流器工作时电流中的无功分量和高次谐波分量不进入直流侧的特点[4],校正完成的电流内环可以近似为一阶惯性环节:
![]() (1)
(1)
其中 ![]() —电流环增益系数(对应有功分量)
—电流环增益系数(对应有功分量)
![]() —电流环等效时间常数
—电流环等效时间常数
因此由滑模控制器构成的电压外环结构如图3。

图3 系统的电压外环
其中 SMC — 滑模控制器
Go(s) — 变流器输出部分传函
![]() (2)
(2)
滑模控制器设计基于图3进行。
3 滑模控制器的设计
考虑到实施滑模控制时,一般会因“结构”的切换使系统的运动点在切换线面上产生抖动。这种抖动是滑模变结构控制所特有的由切换控制机理引起的现象。但这种抖动又是我们所不希望出现的。所以,对此只能想办法减小而不能从根本上消除。为了消除这种抖动,我们在被控对象上认为增加一个积分环节构成广义被控对象,再对构成的广义对象设计滑模控制器。此时,系统的广义控制对象为:
![]() (3)
(3)
取滑模控制策略为比例切换控制律
![]() (4)
(4)
其中 ![]() ,
, ![]() ,
, ![]() 的取值范围是
的取值范围是

![]() (5)
(5)

![]() (6)
(6)

![]() (7)
(7)
切换函数为:
![]() (8)
(8)
根据广义滑模条件 ![]() ,可以确定滑模控制器参数:
,可以确定滑模控制器参数:
![]() (9)
(9)
 (10)
(10)
 (11)
(11)
实时控制时上述所有运算由DSP实现。
4 仿真和实验
实验系统参数:L=9.3mH,Rs=0.1Ω,C=2000uF,R的变化范围是50~138Ω。切换函数选择为:c1=90300,c2=601。确定的滑模控制器参数为:α1=0.5,α2=0.15,α3=0.001, β1=-0.0009, β2=-0.2, β3=-0.0012。
系统仿真的结果示于图4,在此情况下三阶滑模的相轨迹三维坐标系下的仿真结果见图4(a)。可见从初始点到达滑模面和其后系统的动态品质良好,滑模运动段存在较小的抖动,达到了预期的效果。系统无扰动情况下的输出的仿真示于图4(b)。系统参数摄动时响应基本不变,显示了很好的鲁棒性。存在负载扰动时系统的响应见图4(c),系统较快地克服了扰动,满足控制要求。
变流器实验的结果示于图5。可见与仿真结果比较接近,说明了滑模控制取得了预期的效果。图6示出了三相PFC变流器一相输入电流的波形,可见实现了单位功率因数。

(a)
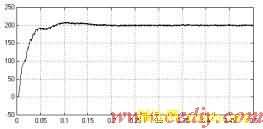
(b)无扰动情况下的输出电压

(c)有扰动情况下的输出电压
图4 系统仿真结果

(a)当R=138Ω→58Ω时相电流和输出电压波形
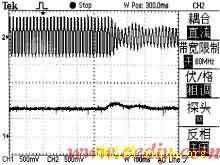
(b) 当R=58Ω→138Ω时的网侧相电流和输出电压

(c)一相输入电流波形
图5 滑模控制实验结果
5 结 语
采用滑模控制技术对三相PFC变流器非线性控制对象实现控制可以得到关于系统参数的鲁棒性控制;以DSP实现控制算法能够满足系统控制的速度要求;电流内环采用分解控制可以精确实现无功控制;整个系统响应迅速能够满足实际要求。
参考文献:
[1] 傅诚. 基于DSP三相变流器滑模变结构控制. 燕山大学工学硕士论文. 2002年3月
[2] Vladimir Blasko, Vikram Kaura, A New Mathematical Model and Control of a Three-Phase AC-DC Voltage Source Converter. IEEE Trans. on Power Electronics, 1997, 12(1): 116-123
[3] 熊键, 康勇. 三相电压型PWM整流器控制技术研究. 电力电子技术, 1999, 33(4): 5-7
[4] 郑颖楠, 王炎, 邬伟扬, 刘彦民.可逆变流器输入电感分析与计算. 电力电子技术1999.2, 20-22
作者简介:
郑颖楠 男,1955年,教授。研究方向为PFC技术和特种电源。
<--end of font define-->

















